Obsah
Experimentální konstrukce bezpilotního letadla
Jde původně o školní projekt, který byl započat několika nadšenci na Ústavu letadlové techniky Fakulty Strojní ČVUT. Postupem času se ale projekt rozšířil až na současnou spolupráci pracovníků několika kateder Fakulty elektrotechnické. Stále se ale hledají další spolupracovníci, kteří by byli ochotni se na vývoji bezpilotního prostředku podílet.
"Žehlička" UAV02A
Hlavní vylepšení
- Spolehlivější sběrnice (CAN)
- Větší prostor pro avioniku a náklad
- Modularni konstrukce draku umoznuje variabilne modifikovat konstrukci podle cilove aplikace.
- Přidání další řídící vrstvy realizované výkonným počítačem s ARM
Samokřídlo UAV01A
Drak letadla
Mechanická konstrukce
Matematický model
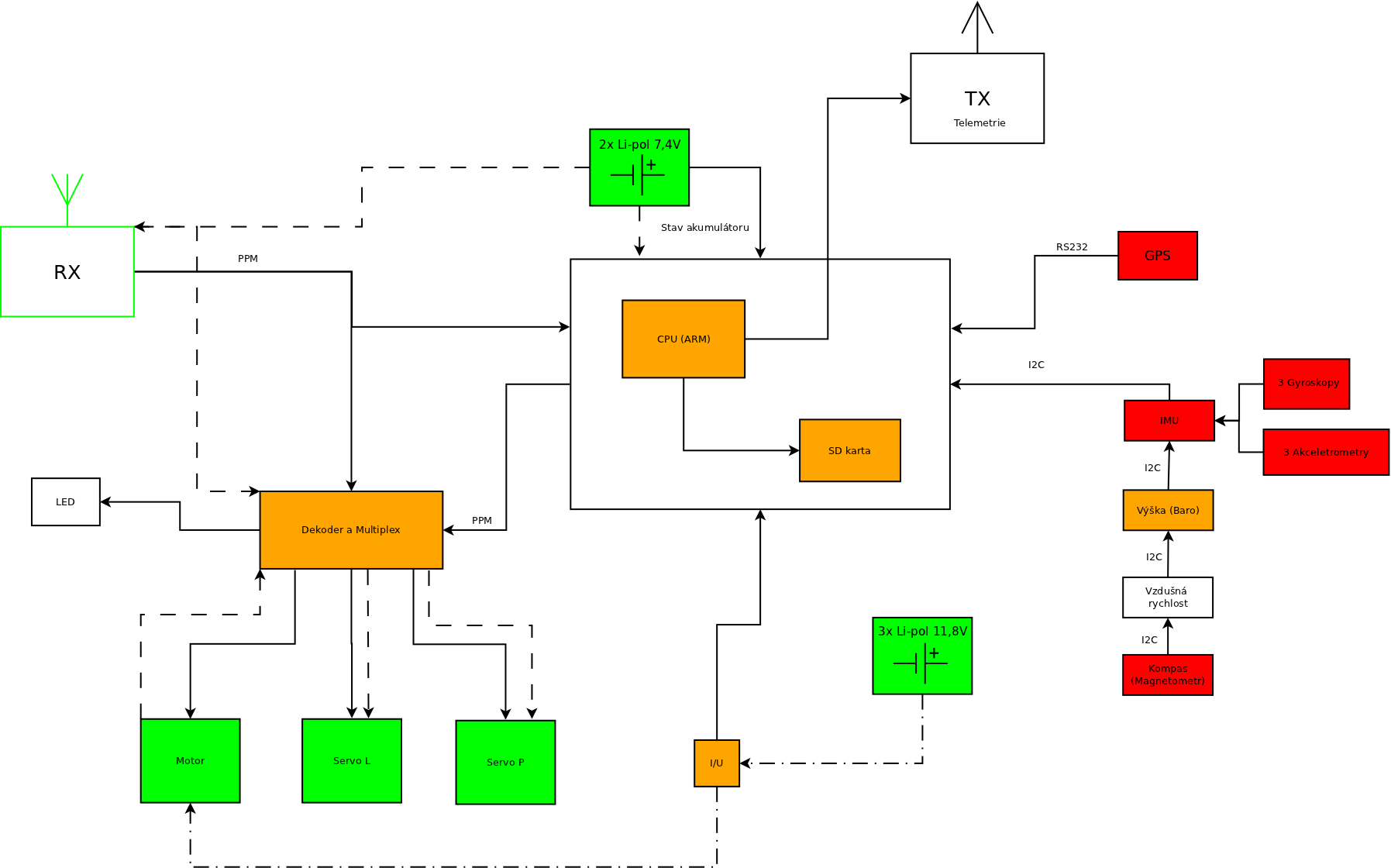
Řídící systém
PPM Demultiplexer
Je část avioniky letadla, která zabezpečuje přemínání mezi pozemním řízením pomocí klasického PPM signálu a PPM signálu vyvedeného z řídící desky autopilota.
Při jejím vývoji je požadováno následující
- Vysoká odolnost proti poruchovýcm stavům (nekorektní vstupní signály, výpadky napájení, watchdog timer)
- Možnost přepnutí na ruční řízení na základě signálu z pozemního PPM vysílače.
- Failure safe landing (vypnutí motoru a uvedení do krouživého režimu)
- Indikace stavů pomocí LED imístěných na okrajích křídel.
- Záznam havarijních dat (black box)
Pozemní řídící stanice
Pozemní stanice by měla zajišťovat komunikaci s bezpilotním prostředkem a podporu jeho operačních možností. Od pozemní stanice se proto očekává, že bude:
- Poskytovat bezpečný komunikační kanál s UAV
- Měřit meteorologické veličiny
- Vytvářet korekce DGPS
- Zlepšovat navigační možnosti při přistání
DGPS
Pozemni stanice bude vysilat vlastni telemetrii, ktera bude obsahovat DGPS korekce. Ty se v UAV pouziji pro vypocet polohy, ktera se opet telemetrii odesle do pozemni stanice. Navigace tak bude v případě malých vzdáleností v podstate rozdilova proti pozemni stanici. To umozni snazsi definovani bodu trasy a nasledne i pripadne zjednodussi budouci moznost pristavani pobliz pozemni stanice.
Meteorologická data
Měření meteorologických údajů je důležité kvůli plánování letu, navíc zlepší možnosti přistání. Veličiny by mohly být měřeny již existující konstrukcí automatické meteostanice.
Referenční hodnota tlaku by mohla být použitelná pro přistání pomocí barometrického výškoměru, který má nyní rozlišení lepši, než 1m.
Komunikace
Vzhledem k nutnosti použití vyšších radiových pásem z důvodu získání dostatečné šířky pásma pro přenos obrazových dat bude potřebné zaručit přímou viditelnost mezi přijímačem a vysílačem UAV. To lze vyřešít několika způsoby.
- Stožár s anténami umístěný poblíž pozemního řídícího stanoviště.
- Soustava antén umístěná na balonu.
V obou případech by bylo výhodné k propojení pozemní stanice a antén využít optického vedení a koaxiálního napájení po kotvících lanech.
Video přenos
Stále nedošeným ale základním problémem je způsob videopřenosu z UAV na pozemní řídící stanici. Ideálním řešením by bylo HD video v kombinaci s panoramatickými obrazovkami a širokoúhlými kamerami na UAV.
Tato technologie ale stále není příliš rozšířená. Jednou z možností ale je využití modulátorů:
Což jsou DVB-S modulátory s QPSK modulací.
Poznámky
- fyzicky oddelit multiplexor od autopilota
- vyskomer nad terenom, kvoli automatickemu pristavaniu
- radiomajak v pripade havarie
- digitalne serva v 2. iteracii (http://www.openservo.com/)
Úkoly k vyřešení
Demultiplexer a přepínač PPM
Dokončení konstrukce demultiplexeru PPM a přepínače signálu z autopilota a RC přijímače. Jde o zařízení zpracovávající PPM signál z R/C přijímače umístěného na letadle a vyhodnocující (podle stavu konkrétního PPM impulzu) zda má být letadlo řízeno z RC ovládání, nebo z autopilota. Firmware je již z větší části napsaný pro ATmega328. Zbývá převážně otestování spolehlivosti provozu. A doladění konstant ve firmwaru.
Počítačová simulace UAV
Pro ladění autopilota UAV je výhodné použít takzvanou hardware-in-loop simulaci její princip spočívá v použití počítačového modelu systému, který se chová, jako reálný systém. Takovým modelem může být například model napsaný v Matlabu, nebo některý vyzualizační a výpočetní systém jako například X plane nebo FlightGear.
Měření IAS
Složení a zprovoznění snímače s Pitotovou trubicí, a diferenčním snímačem tlaku. Součástí realizace by mělo být napsání vyčítajícího driveru do ChibioOS. A návrh algoritmu na kompenzaci měřené hodnoty podle teploty a vlhkosti vzduchu, která bude měřena jinými palubními čidly.
===== Převodník CAN - PPM =====
Návrh a otestování prototypu převodníku sběrnice CAN. Převodník by měl být realizován z některých modulů stavebnice MLAB a MCU. který bude převod realizovat. Při řešení se lze inspirovat již existujícími řešeními dostupnými na internetu.
CAN servo
Výškoměr s podpůrnými parametry
Vytvoření modelu atmosféry za účelem měření výšky barometrickým výškoměrem. Model by měl pracovat ve velkém rozsahu (úroveň moře až stratosfréra) kvůli jeho potecnciální možnosti využití na balonové sondě ABL01A. Do modelu by měly vstupovat pomocné parametry získané z dostupných meteorologických dat, nebo měřené přímo pozemní řídící stanicí UAV,
Kalibrace inerciální navigační jednotky
Implementace automatické kalibrace kompasu za použití hodnot z akcelerometrů, případně gyroskopů. Kalibrace by měla být prováděna na zemi v rámci předletové přípravy pohybem celého letadla.
Demo vyčítání snímačů přes I2C je k dispozici v SVN repositáři na cestě: /home/odroid/svn/svnUAV/Control_sytem/sw/navigace/IMU
$ ./IMU_test.py /usr/local/lib/python2.7/dist-packages/setuptools-5.7-py2.7.egg/pkg_resources.py:1049: UserWarning: /home/odroid/.python-eggs is writable by group/others and vulnerable to attack when used with get_resource_filename. Consider a more secure location (set with .set_extraction_path or the PYTHON_EGG_CACHE environment variable). No handlers could be found for logger "pymlab.sensors.iic" ALTIMET data acquisition system started Temperature: 20.94 Pressure: 96044 Gyro: X -12 Y: 7 Z: -5 Acc: X 0.04 Y: 0.06 Z: -0.99 Mag: X 371 Y: 403 Z: -88 Temperature: 20.94 Pressure: 96042 Gyro: X -7 Y: -7 Z: -6 Acc: X 0.05 Y: 0.06 Z: -0.99 Mag: X 371 Y: 403 Z: -87 Temperature: 20.94 Pressure: 96042 Gyro: X 2 Y: 1 Z: 0 Acc: X 0.05 Y: 0.06 Z: -1.00 Mag: X 372 Y: 402 Z: -86 Temperature: 20.94 Pressure: 96042
Toto demo bylo naprogramováno pro jednodeskový počítač odroid-u3, proto je v kódu fixně číslo I²C portu.
Návrh komunikačního protokolu
Cílem úlohy je návrh efektivního protokolu přenosu telemetrie mezi UAV a pozemní stanicí. Protokol by měl být textový, aby byl v případě selhání některého systému zpracovávatelný i lidmi. Ideálně by měl být stejný formát použit k záznamu na SDkartu na palubě UAV. Z možných protokolů jde například o JSON, nebo některou formu XML.
Podobný protokol by mohl být případně použit i na HIL simulaci.
Analýza možných poruch
Sestavení a analýza možných poruch systémů UAV a návrh jejich ošetření. Dále návrh optimální koncepce rozdělení řídících systémů a zvolení vhodné struktury a redundance řídících počítačů odolné proti poruše.
Vytvoření matematického modelu UAV
Vytvoření počítačového modelu UAV na základě konstrukčních výkresů. Přosnost modelu pak může být ověřena měřením inerciální jednotkou na palubě letadla.
Dokumentace
Technická dokumentace projektu je uložena v SVN repozitáři MLAB na adrese svn:svn.mlab.cz/svnUAV přístup pro čtení je volný. V případě zájmu do projektu přispívat prosím pošlete email na adresu kaklik@mlab.cz V Ubuntu stačí spustit následující příkaz k získání celé dokumentace projektu: svn co svn:svn.mlab.cz/svnUAV
Řízení projektu
Pro správu úkolů a dohled nad jejich plněním v rámci projektu používáme Redmine.
Standardy
Organizace Dronecode se snaží o standardizaci technologií používaných na UAV.
Administrativa
Lidé
- Ivan Jerabek
- Jakub Kákona - kaklik@mlab.cz
- Marian Such
- .
- .
- .
Partneři projektu
Vývoj je podporován vývojovým týmem Universal Scientific Technologies s.r.o. 
Legislativní omezení týkající se UAV
Rádiová komunikace
Plánované aplikace
- Práškovací/postřikové letadlo
- Testovací realizace Bezpilotního aerovleku
- Dodávky léků a lékařského materiálu
- Doručování drobných zásilek
Reference
Paparazzi Autopilot je nejdéle existující projekt opensource autopilota. Z něj vychází i OpenPilot LibrePilot, který je více komerční. PixHawk je konstrukce autopilota z ETH. Je zaměřený hlavně na možnost připojení kamery a zpracování obrazových dat. Od ostatních konstrukcí se odlišuje zavedením “fail-safe” procesoru. Má také digitálně vyřešené čidlo vzdušné rychlosti připojené na I²C. Jeho výhodou je implementace protokolu MAVlink, který umožňuje přenos telemetrie ve standardním formátu do pozemních stanic.
Ostatní projekty řídících jednotek UAV
- NAVIO2 - Kombinuje fail-safe mikrokontroler a ARM počítač s běžícím Linuxovým jádrem.
- RAMA Projekt ČVUT
- Sense solar - vychází z projektu PixHawk.