Table of Contents
Fokuser pro dalekohledy - TEFO01B
Fokuser TEFO01B vychází z fokuseru TEFO01A (níže). TEFO01B má nový software, který poskytuje rozhraní pro ovládání fokuseru pomocí UDP zpráv. Způsob komunikace je popsáno na GitHub repoztáři.
Celá sestava fokuseru je zapojena do řídícího PC pomocí USB. K jednomu PC může být připojeno více takových zařízení. Jednotlivé fokusery jsou rozlišeny pomocí sériového čísla.
AROM
RTS2
Pro použití fokuseru na robotickém teleskopu D50 vznikne ovladač komunikující s řídícím softwarem pomocí UDP zpráv.
TEFO01A
Elektronický fokuser s mikrokrokováním, které snižuje vibrace generované krokovým motorem.
Konstrukce fokuseru také umožňuje přesné uložení aktuální nastavené pozice hřídele. A její kontrolu a rekonstrukci po případném výpadku napájení ze známých dat o systému.
Fokuser umožňuje připojení pozičních senzorů. Základem je magnetický úhlový senzor měřící úhlovou pozici hřídele v rámci jedné otáčky. Měření může být podle potřeby rozšířeno a absolutní odměřování v posuvu, nebo jakékoli jiné měřitelné veličiny. Například teploty pro kompenzaci vlivů roztažnosti.
Poziční senzory připojené na sběrnici I²C umožňují i autodiagnostiku odhalující případné mechanické závady v sytému. Jako jsou například poruchy převodovky, nebo kontrola vůle v převodech.
Zapojení
Konstrukce vychází z aplikace knihovny pymlab a I²C sběrnice. Celý systém se tak ovládá přímo z nadřazeného počítače a neobsahuje žádný firmware, který by bylo nutné změnit při změně konfigurace zařízení. Je proto možné připojovat další motory nebo snímače a tyto změny zahrnout do řídícího software aktualizací konfiguračního souboru.
Použité moduly
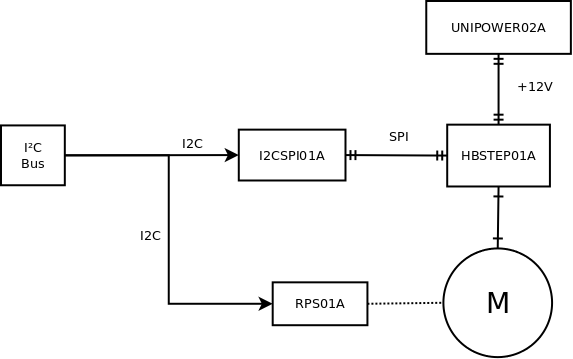
Budič krokových motorů HBSTEP01B je připojený ke konverznímu modulu I2CSPI, který jej umožní ovládat přes sběrnici I²C. Na kterou lze připojovat další čidla, jako je například rotační čidlo polohy RPS01.
Sběrnice I²C pak může být připojena k dalším zařízením různými způsoby. V případě krátkých vzdáleností lze I2C zařízení připojit přes USB modulem USBI2C. Pro vzdálenosti >2m lze použít rozhraní RS232 a použít modul I2C232V01A, který rozhraní RS232 vytvoří. TTL napěťové úrovně pak ještě musíme přizpůsobit RS232 specifikaci modulem RS232SINGLE01A. Další možností je dlouhé I2C vedení nahradit diferenciálním vedení pomocí modulů I2CDIFF.
Ovládací software
Zařízení TEFO01A předpokládá použití knihovny pymlab pro ovládání všech komponent. Po její instalaci je možné otestovat ovládání motorů pomocí kódu, který je v MLAB svn.
Somotná knikovna pymlab pak obsahuje ještě příklad pro čtení magnetického čidla RPS01A.
Principy ovládání fokuseru
Fokuser je opatřen mikrospínači, které slouží pro omezení pohybu motoru v požadovaném rozsahu. Základní funkce mikrospínačů je zastavení motoru při jejich sepnutí. Lze je však použít i pro nulování počáteční pozice motoru. Aby však fokuser nemusel být inicializován po každém zapnutí napájení. Obsahuje zapojení ještě magnetické čidlo polohy, které umožňuje zjistit absolutní pozici hřídele šneku v rámci jedné otáčky. V případě, že systém bude znát předchozí polohu šnekového kola před vypnutím. A načtená poloha z čidla souhlasí s touto předchozí polohou lze s vysokou pravděpodobností předpokládat, že během vypnutí nedošlo k přeostření fokuseru.
V opačném případě je nutné provést reinicializaci na poslední zaznamenanou pozici motoru.