Table of Contents
Automatic balloon launcher ABL01A
The whole system should serve as a complement to radio meteor detector network, and possibly to its visual alternative (video observation 1) and bolide camera).
The purpose of the device is to refine the accuracy of a dark trajectory estimate of a meteor through introducing corrections to the flow of air masses during the meteor's flight in the atmosphere. As a consequence the elliptical impact area of the meteor on Earth's surface should reduce.
Data on atmospheric currents will be acquired by a weather balloon deflated immediately after the detection of a bolide flyby through the atmosphere. The balloon launch site should be chosen automatically based on the meteor trajectory estimate and known coordinates of the balloon silos in the network.
An important part of the system is the fully robotized discharged station (balloon silo), enabling the discharge of balloon from known coordinates without human intervention. A by-product of such development will be a device capable of future automation of classical meteorological radiosonde discharge.
Ground discharge box
The ground balloon network station would consist of compact box containing technology needed to discharge the balloon sonde. The device must be able to withstand (in order of several years) the standby mode and wait for the command to release the sonde.
Technical requirements
Most of the electronics is composed of MLAB brick system modules.
Communication with the network of stations
- Ethernet - ETH01A module
- RS232 - RS232SINGLE01A
- GSM (for remote areas)
At the same time, an equipment for telemetry reception of signal from other discharged radiosondae 2) from other stations is necessary.
STM32F10xRxT01A module meets the aforementioned requirements.
Power supply
- local (stand-alone) - photovoltaic panel
- mains supply (AC adapter + UPS)
Fault diagnostics
- Successful start control (balloon lift measurement)
- Temperature, gas filling pressure, medium flow into the balloon measurement
- Moisture inside the box measurement (in the case of leakage and loss of waterproofness through lid puncture , etc.)
Meteorological data
- The basic meteorological variables (temperature, pressure, wind speed) necessary to evaluate the possibility of start would be acquired from the nearest meteorological node or local AWS01B station
- Local GPS (station position and accurate time) → start log. GPS01A
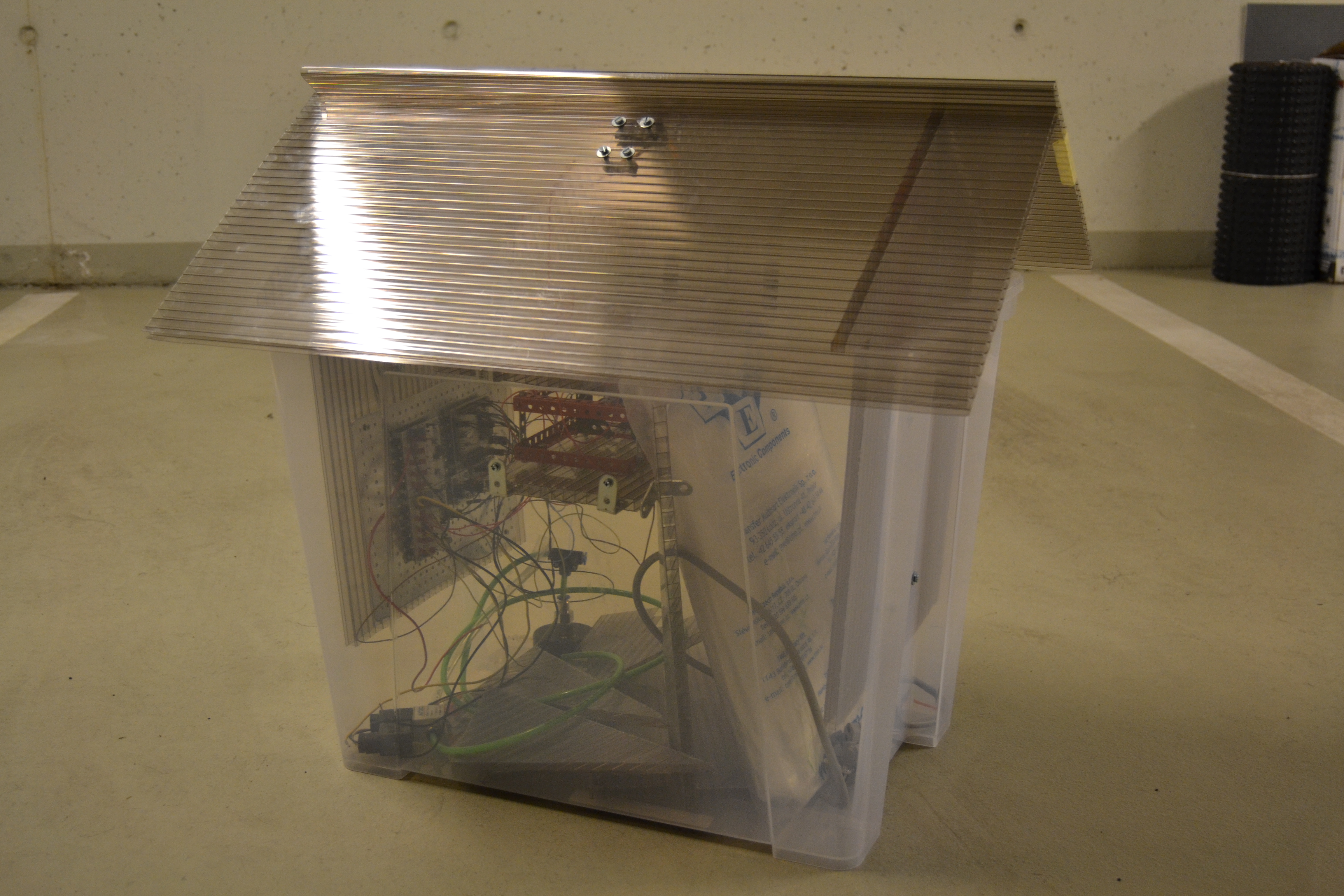
Mechanical construction
The ground discharge box is constructed to be able to run under various weather conditions. It has a shape of triangular prism with one side standing on a raised platform and the other two covered with photovoltaic cells supplying energy to the electronics. After the discharge, they can be used to check the correct slide-down of the roof panels. The monitoring of the supplied power during the day also enables to check for the occurrence of solid obstacles in the vicinity of the station.
The material used for construction is welded polyethylene, making the station waterproof and resistant to dirt entry, that could damage the balloon.
- A construction designed to enable the discharge of present-day professional weather balloons.
- Activation of mechanical components by burning the plastic fiber
- Sealing of the balloon by melting the its neck (after filling the balloon)
- The roof panels held flexibly by a stretchable strap, ensuring the sealing of the roof ridge.
Actuators
Most of the actuators should be designed with an emphasis on maximal reliability. Therefore, they would probably be springs with burnable plastic fuses (silicon fiber or ribbon burned by a powerful resistor). NFET4X01B module can be used To switch the current to resistors.
Pneumatics
Helium management in the box must be designed to prevent the loss of helium by diffusion through porous materials like plastics or rubber. The main inlet valve must therefore be made of metal and ideally placed directly on the neck of the bottle.
An interesting idea would be to make use of bernoulli efect, when a low-pressure gas, like chemically produced hydrogen, would be sucked inside by a flow of the compressed helium, similar to inflation of this air pad.
Carrier gas
In the case of our functional prototype, we have experimented with compressed helium as a source gas for the balloon filling. Preferred option, in this case is the use of disposable cartridges with compressed helium. Such packed helium is however quite expensive (700 Kč/0,1m³) and hydrogen is probably not available in this form.
An interesting solution seems to involve a chemical reaction to produce hydrogen directly in the discharge box. Discovered in 2007, a reaction of gallium and aluminum alloy with water produces hydrogen without an extensive heat production 3).
The course of the reaction is demonstrated in this video. You can purchase the necessary metals here:
It would be then sufficient to dry the hydrogen produced by this method by cartridge with silicagel.
Experiments with this metod showed difficulty in obtaining the galium back in order for it to be re-used.
Ferrosilicon method makes use of a reaction between the sodium hydroxide, water and a ferrosilicon.
Another option is a catalysed decomposition of the Sodium_borohydride.
In all cases, the volume of the carrier gas should be optimised with respect to required lift and the rate of climb.
Firmware
- The ground station should have an option to reject the discharge in accordance with the configuration set by its owner.
To ensure the running of independent processes the use of ChibiOS/RT is a viable option.
Block diagram

Sensors
- The sensor of helium filling temperature - could be used to measure the temperature decrease during the expansion of helium from the pressure vessel
- Cover opening detection
- Humidity measurement in the box
- The measurement of the current through burnable fuses - the NFET4X01B module has an analog output for each channel
- Meteostation AWS01B for measurement of the basic meteorological variables
- GPS01A - a time synchronisation, an absolute knowledge of the station position, the possibility to generate a DGPS correction
- Balloon lift measurement
- Gas flow into the balloon (by an orifice plate)
Probing balloon
A non-flying prototype of the balloon will be developed using MLAB modules.
Technical specifications
GPS carried by the balloon should be kept in FIX state in order to avoid a delay while waiting for a fix. At the same time, there also exist doubts concerning the accuracy of the GPS in higher altitudes, where the deviation of the measured altitude from the actual one can reach hundreds of meters.
Communication (Telemetry data)
- The primary objective is the measurement of the speed and direction of a wind at know points.
- GPS data at 10Hz, text output NMEA
- Other variables (like temperature, pressure, etc.) are optional.
- Radio and audio beacon (?questionable)
- Radio transmission of the telemetry in 27-450 MHz band: the possibility of using an unlicensed bands (SVN: VO-R-16, VO-R-10).
The GPS must by chosen to function correctly at higher altitudes as well.4).
Transmitter
Integrated transmitters.
Power supply during the flight
- Lithium battery (does not generate heat, minimum operating temperature is -60°C)
- Magnesium battery (generates heat to keep the electronics warm)
- Silver-oxide battery (withstands lower operating temperatures and is environmentally friendly
- An ideal option would be the use of supercapacitors
The solution to the problem of low temperature at higher altitudes could involve the preheating of the balloon at startup.
Construction
- Balloon - PE sack (packed in order to increase the lifetime - as rubber degrades over time) 5) Standard weather balloons parameters
- An option to remotely disconnect the balloon from the sensor (to end the ascent)
- A prototype filled with helium, mass-produced device by hydrogen (apart from lower price, the use of hydrogen is more environmentally friendly as well - helium released into the atmosphere is due to solar winds irretrievably blown away into the space. In addition to that, hydrogen can be produced by chemical reaction directly during the balloon filling).
- Meeting the safety requirements
Firmware
- Data records from balloon gondola → microSD card
Block Diagram

Legal requirements
The rules for free unmanned balloon flights are defined in the aviation regulations “L-2 Pravidla létání”, appendix 5 and R.
Balloon Classes
The balloon should be of B2 class, that is defined as a free balloon with the volume under 3,25 m^3 and none of the dimensions exceeding 2m when inflated to its maximal size.
Launch permission
An useful load refers to all the objects and materials that could, in an event of a collision with an aircraft, cause a damage to the aircraft (especially sparkles, glowstics,LEDs etc.) and any load exceeding a weigh of 0.1 kg. Due to this definition, a permission must be obtained in order to operate the balloon. All the information concerning the flight (like date, time and place of discharge, useful load, etc.) has to be published in Aeronautical Information Publication (AIP). In the case of special instances, like an unexpected observation, a warning must be issued in the form of a NOTAM notice, at least 24 hours before the balloon's take-off.
Materials
The balloon must not be filled with flammable and explosive gases, with the exception of a permission issued by CAA (http://www.caa.cz/index.php?lang=2). Restrictions on the materials used for antennae and batteries are not specified. Such restrictions are not specified for the materials used for the balloon as well, but when using a balloon with high luminosity or made of materials with high light or radar reflectivity, it must be reported to nearest air traffic control centre. A material (a rope, a thread) connecting the balloon with the sonde must not tolerate a force exceeding 230N.
Ascent altitude
Without limits.
Deployment site
The restrictions include all Prohibited, Restricted and Dangerous areas, as well as temporarily activated areas during their use, except when a permit has been issued by Civil Aviation Authority or when the area is reserved for the flight of the balloon in question. Operations close to the state borders or airports are problematic and as such are not recommended.
Solving legal problems
- To design a safe balloon, that will meet the CAA flight safety requirements.
- To control the ascent and actively prevent a possible collision. (This system could as well simplify the return of the balloon, similar to this video http://www.youtube.com/watch?v=rpBnurznFio )
- Autodestruction system activated in the case of impending collision.
Network's control system
The configuration and the control of the network should be provided by an universal framework for distributed measurements.
Launch Planning
The launch of the balloons must be planned automatically with regard to the effectiveness of the measurement and the air traffic safety as well.
Aviation maps
- Aeronautical information service - AIP chapter ENR 6.
Other maps are mostly scanned versions of originally paper aviation maps and so are not suitable for automatic planning.
Documentation
Technical documentation
The project's technical documentation is saved in SVN repository at MLAB: http://svn.mlab.cz/svnmlab/Designs/Measuring_instruments/ABL01A/
svn://svn.mlab.cz/MLAB/Designs/Measuring_instruments/ABL01A/
Project management
For tasks management and supervision of their implementation we use Redmine.
Documents and presentations concerning project management are stored here:
svn co https://lynx1.felk.cvut.cz/svn-students/pto/pto-13138-1 svnPTO
Project presentations
Videos
Photos
Implementation means
People
The project is carried out by the team of several ČVUT students from Department of Measurement and Department of Cybernetics.
- Bc. Eva Pomíchalová - Air and Space Systems
- Bc. Jakub Kákona - Air and Space Systems
- Bc. Zbyněk Poskočil - Sensors and measurement
- Bc. Ondřej Hanuš - Air and Space Systems
- Bc. Pavel Jícha - Cybernetics and Robotics
Technical support
Most parts of the project were provided by Universal Scientific Technologies s.r.o. 
Suppliers of the construction equipment:
References
Similar projects
TODO
- A sounding rocket could be a future improvement of the project.
1)
e.g. CEMeNt network