
Table of Contents
Experimental construction of Unmanned Aerial vehicle
"Žehlička" UAV02A
Major improvements
- More reliable bus infrastructure (CAN)
- More volume and weight capacity for experimental avionics and payload
- Adding additional control layer realised by powerfull ARM computer ODROID-X2, other single board computers variants will be available soon.
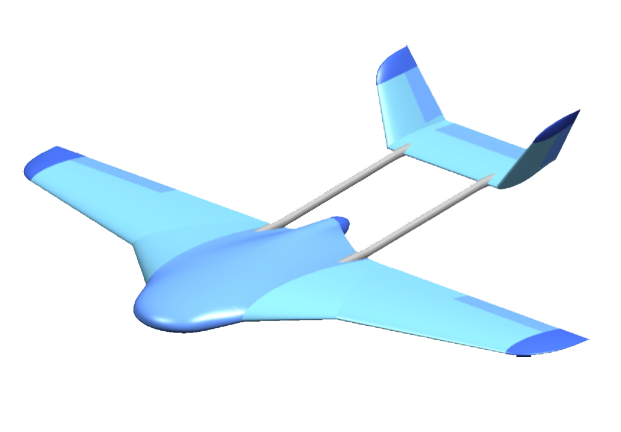
Flying wing "Samokřídlo" UAV01A
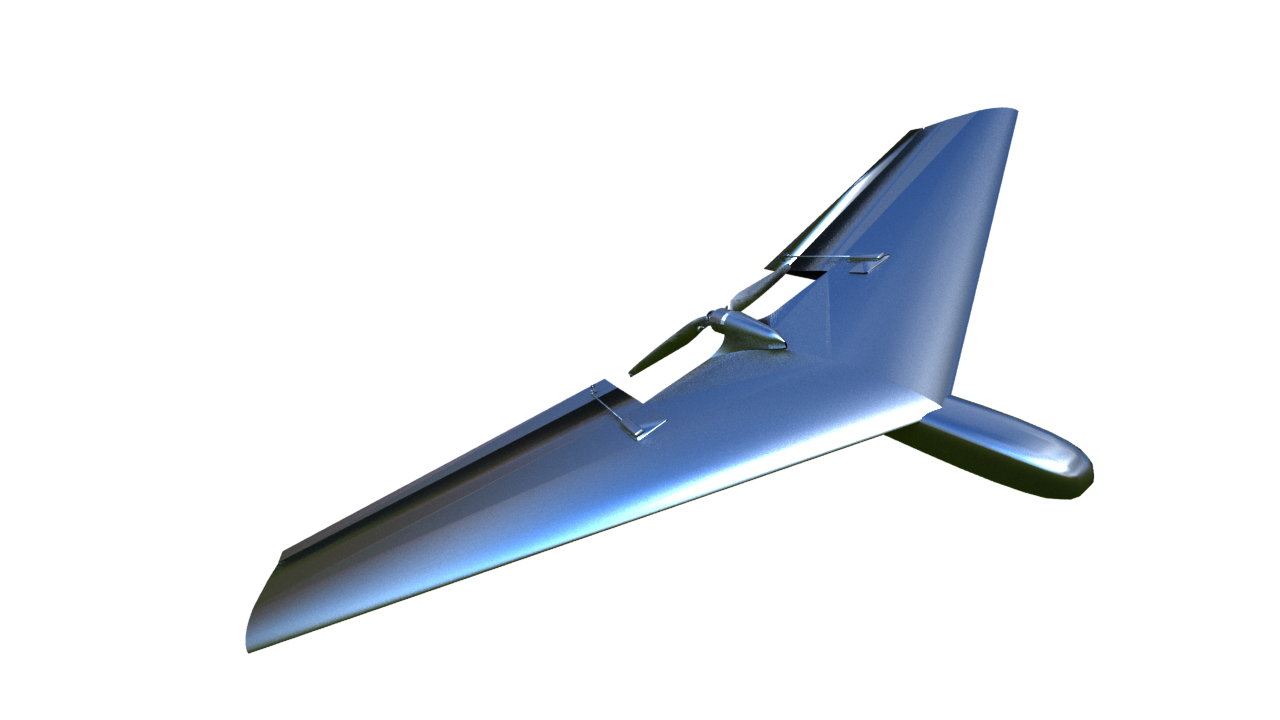
Airframe
Mechanical Construction
Virtual mathematical model
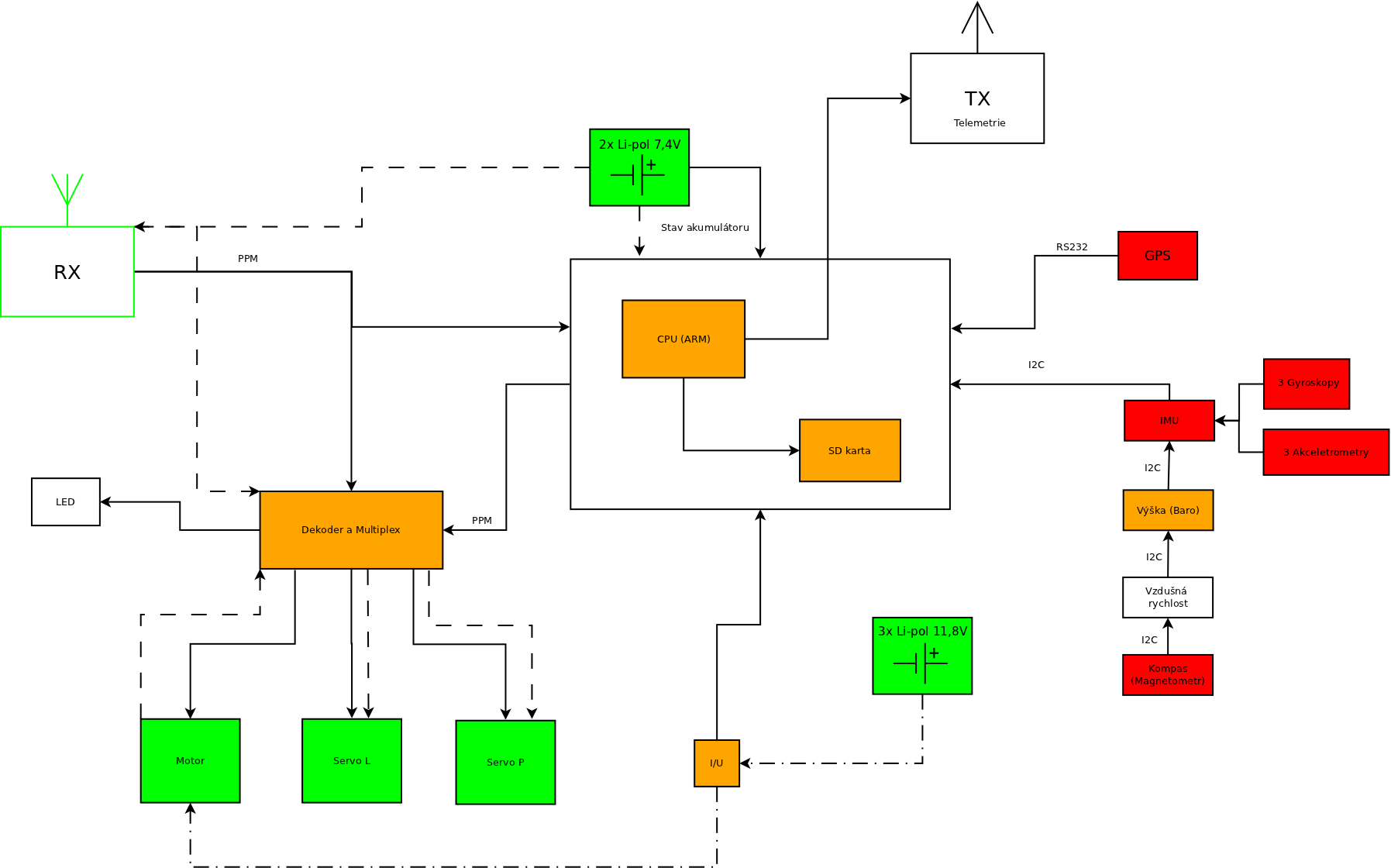
Control System
Required features
- 10Hz update rate
- Airspeed (min 16m/s, avg 22,3 m/s, max 30m/s) 600Pa max
- Barometer (Air density, altitude)
- Humidity sensor (Fail safe, Air density)
- Temperature sensor (Fail safe, Air density)
- Camera?
- Battery Voltages, Currents (Battery gas gauge)
- Engine power sensing, max engine current 30A.
- GPS
- IMU (Akcelerometers -3G to 5G)
- Magnetometer
Hardware
Non fly prototype
Non fly prototype is build from MLAB prototyping modules.
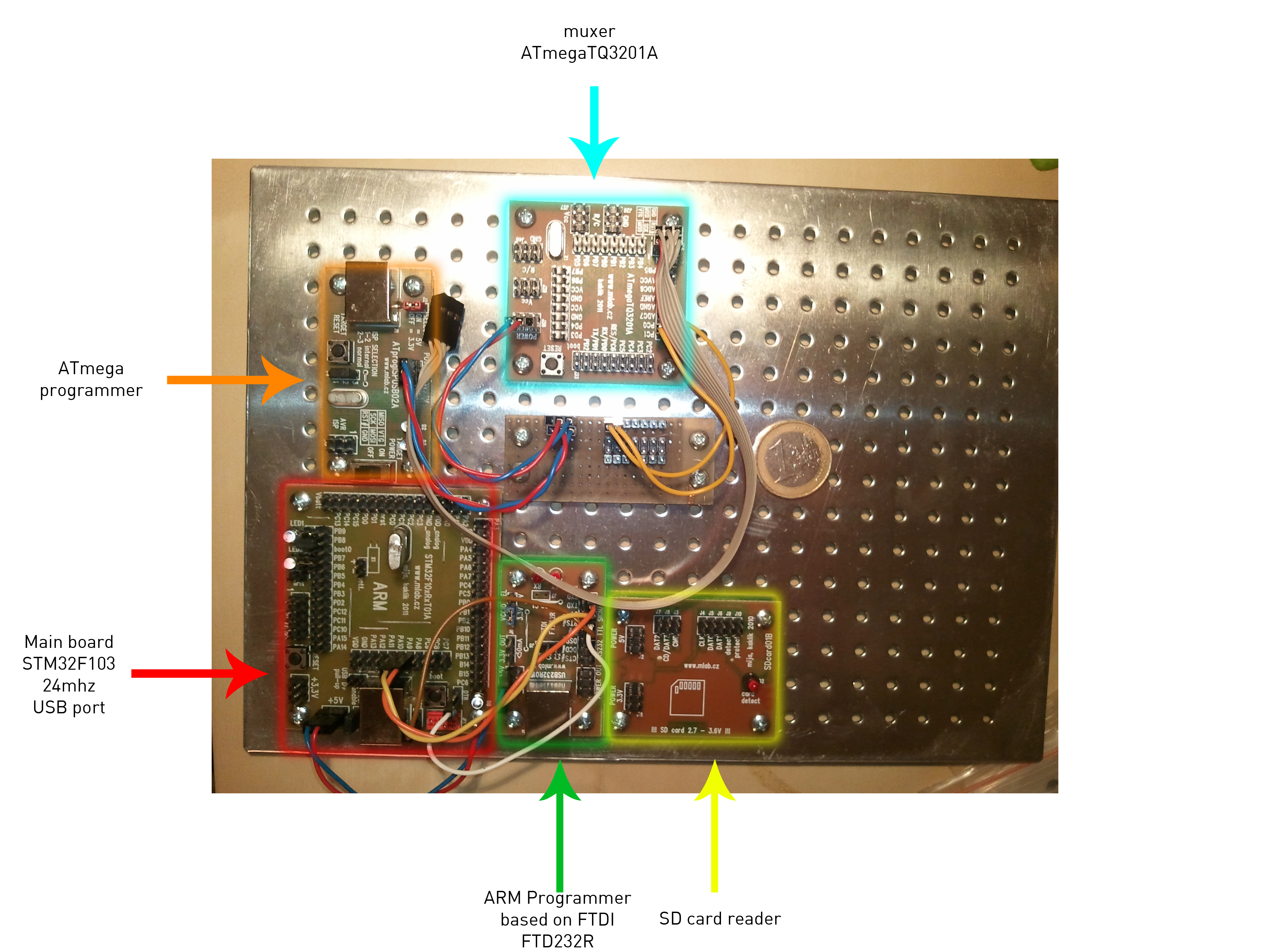
CPUs
PPM Decoder/Demultiplexer is build from ATmegaTQ3201A populated by ATmega328 and 16MHz crystal.
Main UAV control board is based on STM32F10xRxT01A ARM microcontroller module populated with STM32F103 microcontroler.
Sensors
IAS
- Airspeed - Differential pressure.
GPS
Current and Voltage sensor
Resistive current measurement sensor with analog output and voltage divider to 3,3V range IUC01A.
Altitude measurement
Barometric ALTIMET01A pressure and altimeter sensor. And GPS data.
Absolute terain altimeter
Absolute terrain altimeter is necessary for correct landing procedure. It can be resolved by several methods laser, ranging, radar ranging, camera terrain angle speed measurement, camera laser trigonometry, and sonar ranging.
We would use the simplest sonar ranging method at beginning.
IMU
Inercial measurement unit is based on IMU01A MLAB sensor module
Magnetometers
Magnetic orientation will be measured by two redundant magnetic sensors modules MAG01A.
Telemetry
Telemetry will be realized by UART ascii output in NMEA like format. Telemetry modules.
Another considered variant is use of some more powerfull telemetry modules Radiometrix modules or Laird Technologies AC4868
Data logging
Measured data will be stored in SD card. SDcard01B
Radio Control
We will use the JETImodel RC receiver JETI Duplex RSAT2 Some interesting capability of JETI Duplex technology is duplex comunication between receiver and transmitter. So telemetry download via JETI Duplex RC receiver could be possible. Old JETI Duplex V1 protocol specification
Software
Ideas
linear algebra
Eigen some algorithms will use quaternions to prevent gimbal lock.
realtime OS:
Bachelor's thesis about foundation for our control algorithms. Marián Šuch 2012
Testing
The autopilot software control algorithm will be tested by hardware in loop configuration. Where autopilot hardware will be physical but model of airplane and avionic will be numerically simulated.
Ground control station
Provedeni DGPS: Pozemni stanice bude vysilat vlastni telemetrii, ktera bude obsahovat DGPS korekce. Ty se v UAV pouziji pro vypocet polohy, ktera se opet telemetrii odesle do pozemni stanice. Navigace tak bude v podstate rozdilova proti pozemni stanici. To umozni snazsi definovani bodu trasy a nasledne i pripadne zjednodussi budouci moznost pristavani pobliz pozemni stanice.
Hardware
Datalinks
- USB232R01B USB to serial converter.
Programmers
- ATprogISPUSB02A AVR micro-controller programmer.
Documentation
Technical documentation
Project files are stored in SVN repository (registration required). Remote access is possible by SVN client TortoiseSVN for example. Repository is public for reading, but requires account for write access. If you are interested, write email to kaklik@mlab.cz please.
In Ubuntu run this command to check out all project documents.
svn co svn://svn.mlab.cz/svnUAV
Project management
For tasks management and supervision of their implementation we use Redmine.
Administrative
People
- Ivan Jerabek
- Jakub Kákona - kaklik@mlab.cz
- Marian Such
- .
- .
- .
External links
Other similar known projects for reference:
Partners of project
Project is supported by Universal Scientific Technologies s.r.o. development team 